(1)(1.5) Benewake TFmini/TFmini Plus/TF-Luna
文章目录
前言
Benewake TFmini 激光雷达(Benewake TFmini lidar)和 TFmini Plus 的室内探测距离为 12m,室外探测距离为 7m,重量仅为 5g。
有关这两种激光雷达的更多详情,请访问 benewake.com 的下载区(benewake.com’s downloads area)。

!Note
Copter-3.6 (及更高版本)和 Rover-3.4 (及更高版本)支持该传感器。
1 在哪里购买
2 连接到自动驾驶仪
串行连接可以使用任何空闲的串行/UART 端口。下图显示了如何连接 SERIAL4。
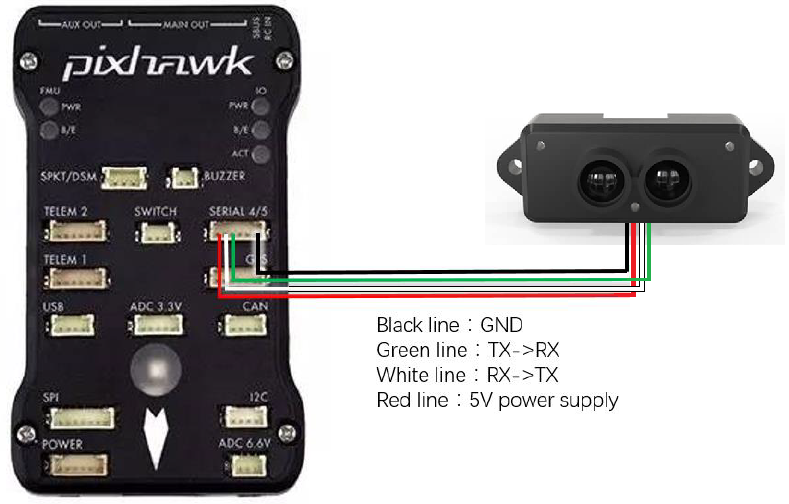
如果使用自动驾驶仪上的 SERIAL4 端口,则应为第一个测距仪设置以下参数:
- SERIAL4_PROTOCOL = 9 (Lidar);
- SERIAL4_BAUD = 115 (115200 baud);
- RNGFND1_TYPE = 20 (Benewake-Serial)。
!Note
RNGFND1_TYPE = 20 适用于通过 UART 连接的 TFminiPlus 或 TFmini。如果 TFminiPlus 通过 I2C 与自动驾驶仪连接,则使用 RNGFND1_TYPE = 25(Benewake TFminiPlus-I2C),同时设置 RNGFND1_ADDR = 16(激光雷达的 I2C 地址,十进制)。传感器的默认 I2C 地址为 0x10 十六进制,十进制为 16。
- 对于 TFmini,RNGFND1_MIN_CM = 30;对于 TFminiPlus,RNGFND1_MIN_CM = 10;
- RNGFND1_MAX_CM = 1000(用于室内)或 600(用于室外)。这是测距仪能够可靠读取的距离(厘米);
- RNGFND1_GNDCLEAR = 10 或更精确,即飞行器着陆时测距仪到地面的距离(厘米)。该值取决于测距仪的安装方式。
如果使用的是 Telem2 端口,则上述串行参数应为:
- SERIAL2_PROTOCOL = 9;
- SERIAL2_BAUD = 115。
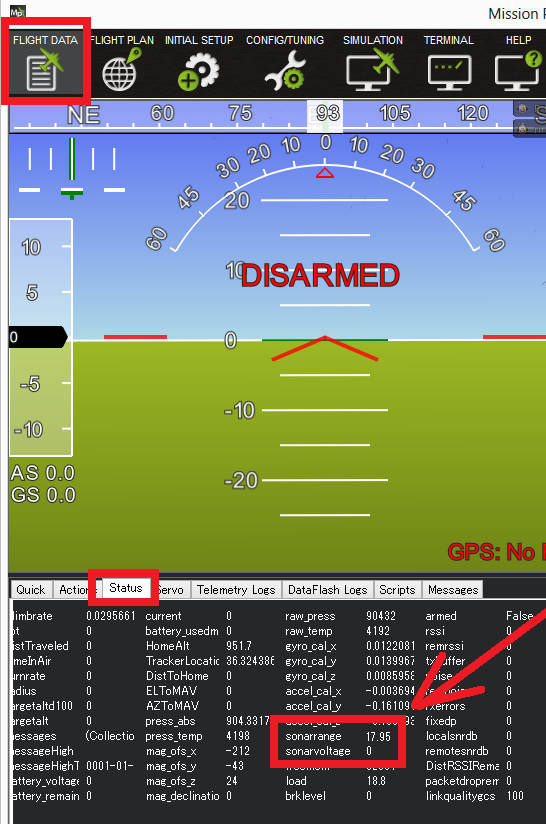
测试传感器
传感器读取的距离可在Mission Planner飞行数据屏幕的状态选项卡中查看。仔细查看"sonarrange"(声纳范围)。
3 参数说明
1、SERIAL4_PROTOCOL:Serial4 协议选择
注意:更改后需要重新启动。
控制 Serial4 端口应使用何种协议。请注意,Frsky 选项需要外部转换器硬件。详情请查看维基百科。
|
Values |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
2、SERIAL4_BAUD:Serial4 波特率
用于Serial4 的波特率。大多数基于 stm32 的电路板可支持高达 1500 的波特率。如果你设置的速率无法支持,并且无法连接到电路板,则应加载不同飞行器类型的固件。这将把所有参数重置为默认值。
|
Values |
||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
3、RNGFND1_TYPE: 测距仪类型
连接的测距仪类型。
|
Values |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|

「智能机器人开发者大赛」官方平台,致力于为开发者和参赛选手提供赛事技术指导、行业标准解读及团队实战案例解析;聚焦智能机器人开发全栈技术闭环,助力开发者攻克技术瓶颈,促进软硬件集成、场景应用及商业化落地的深度研讨。 加入智能机器人开发者社区iRobot Developer,与全球极客并肩突破技术边界,定义机器人开发的未来范式!
更多推荐

 111
111 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)