(1)(1.9) HC-SR04声纳
Ardupilot官网关于《Peripheral Hardware》的翻译 —《(1.9) HC-SR04声纳》。
文章目录
前言
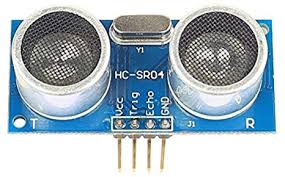
HC-SR04 声纳是一种价格低廉但量程很短(最远只有 2m)的测距仪,主要设计用于室内,但也成功地在室外的 Copter 上使用过。极短的测距范围使其用途有限。
!Warning
RNGFNDx_MAX_CM 必须设置为经过测试的适当值。如果 RNGFNDx_MAX_CM 设置为大于 2m的值,自动驾驶仪将无法正确响应所提供的数据。
1 连接到自动驾驶仪
触发引脚(启动声纳脉冲)和回声引脚(表示接收到回声)需要两个 GPIOs。如果 BRD_PWM_COUNT 设置为两个可用,则这两个 GPIO 可以是 PWM 输出,或者是自动驾驶仪的专用 GPIO 输出(参见自动驾驶仪说明或数据表)(description)。
!Note
在固件 4.2 及更高版本中,将 PWM/SERVO/MOTOR 输出设置为 GPIO 功能的方法有所改变。不再使用 BRD_PWM_COUNT,而只是将单个 SERVOx_FUNCTION 参数设置为"-1"。如果设置为"0",则仍是 PWM 输出,未指定功能,并在电路板安全未激活时输出该输出的微调值。如果舵机功能被"镜像"到远程设备(如 DroneCAN 或 KDECAN ESC),则为了将自动驾驶板的相应输出引脚更改为 GPIO,但仍允许将 SERVOx_FUNCTION 分配给远程设备,可以使用SERVO_GPIO_MASK 参数将电路板引脚分配为 GPIO,而不影响远程设备的 SERVOx_FUNCTION 分配。
设置为第一个测距仪。设置参数后重新启动:
- RNGFND1_MAX_CM = "200"(即最大量程 2m);
- RNGFND1_MIN_CM = "20"(即 20cm 最小量程);
- RNGFND1_STOP_PIN = 输入连接到 HC-SRO4 "触发器"引脚的 GPIO 引脚编号。例如,在 BRD_PWM_COUNT = 4 的 PixHawk 上,此处可使用 AUX6(GPIO 55),下面可使用 AUX5(GPIO54);
- RNGFND1_PIN = 输入连接到 HC-SRO4 "回声"引脚的 GPIO 引脚编号;
- RNGFND1_TYPE = "30"(HC-SR04 声纳);
- RNGFND1_ORIENT = "25"(朝下),如果用于高度控制。
2 参数说明
1、RNGFND1_TYPE:测距仪类型
连接测距仪的类型。
|
Values |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
2、RNGFND1_MIN_CM:测距仪最小距离
测距仪能可靠读取的最小距离(厘米)。
|
Increment |
Units |
|---|---|
|
1 |
centimeters |
3、RNGFND1_MAX_CM:测距仪最大距离
测距仪能可靠读取的最大距离(厘米)。
|
Increment |
Units |
|---|---|
|
1 |
centimeters |

「智能机器人开发者大赛」官方平台,致力于为开发者和参赛选手提供赛事技术指导、行业标准解读及团队实战案例解析;聚焦智能机器人开发全栈技术闭环,助力开发者攻克技术瓶颈,促进软硬件集成、场景应用及商业化落地的深度研讨。 加入智能机器人开发者社区iRobot Developer,与全球极客并肩突破技术边界,定义机器人开发的未来范式!
更多推荐
 124
124 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)